Virtual prototype of LR Mate 200ic
This project uses solidworks, labview, softmotion and arduino.
This project uses solidworks, labview, softmotion and arduino.
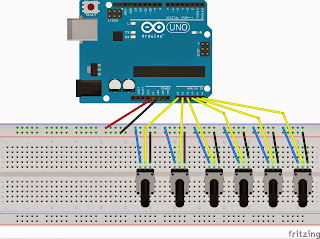
CAD model is created with help of SoldiWorks, Labview used for creating control singnals, Softmotion used for interfacing LabView and Solidworks, Arduino is used for position command by the user, This video is particularly analyzes the inverse kinematics for the robot.
This video made by interfacing labview solidworks and arduino. check the blog about how to interface labview arduino and solidworks.
Entire files can be downloaded here :
https://www.dropbox.com/s/rq46n75fp8h5rrp/robotkinematics.rar?dl=0
No comments:
Post a Comment